GPU-Accelerated Optimization, Optimal Control, and Planning
GPU-Accelerated Optimization, Optimal Control, and Planning
Project Overview
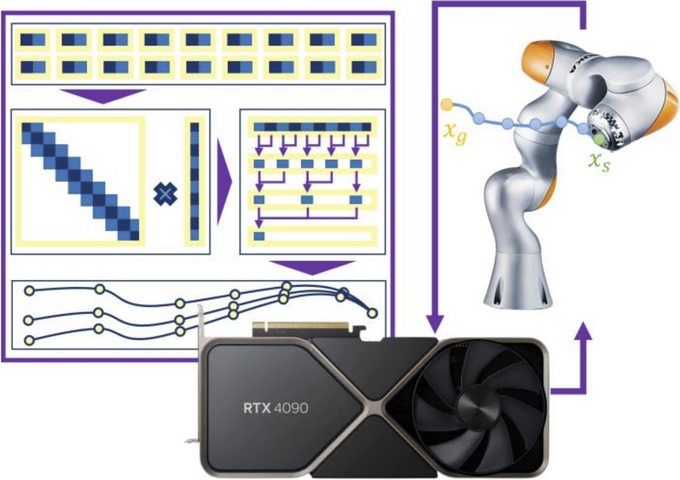
How can we overcome the high computational complexity of optimization, control, and planning algorithms, while still reasoning about the complex dynamics and environments required for field robots? This project seeks to answer that question by co-designing new theoretically sound algorithms that are optimized to take advantage of the large-scale parallelism available on GPUs. Through support from the NSF [1], [2] and Toyota Research Institute this project seeks to go beyond developing point solutions to releasing broadly applicable toolboxes for the robotics and optimization communities.
Publications
-
(2026). pRRTC: GPU-Parallel RRT-Connect for Fast, Consistent, and Low-Cost Motion Planning. In ICRA 2026.
-
(2024). Optimizing at All Scales: Edge (Non)linear Model Predictive Control from MCUs to GPUs. In Frontiers of Optimization at RSS 2024.
-
(2022). GPU Acceleration for Real-time, Whole-body, Nonlinear Model Predictive Control. Harvard University PhD Dissertation.
-
(2022). GRiD: GPU-Accelerated Rigid Body Dynamics with Analytical Gradients. In ICRA 2022.
-
(2020). Reinforcement Learning to Enable Robust Robotic Model Predictive Control. Harvard University Bachelors of Arts Thesis.
-
(2019). Application of Approximate Matrix Multiplication to Neural Networks and Distributed SLAM. In HPEC 2019.
-
(2019). Realtime Model Predictive Control using Parallel DDP on a GPU. In Online Optimal Control Workshop at ICRA 2019.
-
(2018). A Performance Analysis of Parallel Differential Dynamic Programming on a GPU. In WAFR 2018.
-
(2018). Parallel and Constrained Differential Dynamic Programming for Model Predictive Control. Harvard University Masters of Engineering Thesis.