Optimizing at All Scales: Edge (Non)linear Model Predictive Control from MCUs to GPUs
Optimizing at All Scales: Edge (Non)linear Model Predictive Control from MCUs to GPUs
Abstract
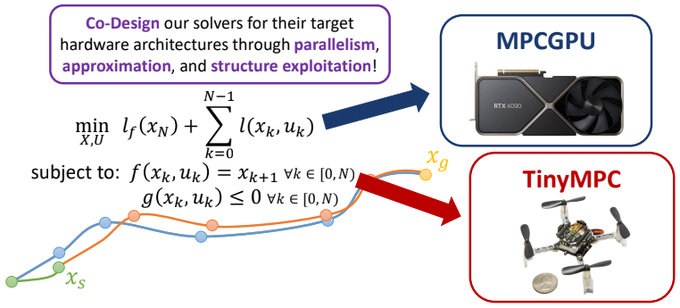
Model predictive control (MPC) is a powerful tool for controlling highly dynamic robotic systems subject to complex constraints. However, MPC, and its underlying (nonlinear) optimization algorithms, are often too computationally demanding to meet real-time rates for robotic platforms, both large and small. These problems are exacerbated by the end of Dennard Scaling and Moore’s law, which have led to a utilization wall that limits the performance a single CPU chip can deliver. As such, we now need to look to the field of software performance engineering to co-design our solvers for their target hardware architectures. As such, in our recent works, by leveraging a combination of parallelism, approximation, and structure exploitation, we have enabled and accelerated (nonlinear) trajectory optimization solvers for real-time performance on non-standard computational hardware, ranging from microcontrollers (MCUs) to graphical processing units (GPUs). This has led to real-time MPC onboard an MCU powered 27g quadrotor for dynamic obstacle avoidance, as well as simulated whole-body nonlinear MPC at kHz rates for a GPU powered manipulator for high speed trajectory tracking.