Code Generation and Conic Constraints for Model-Predictive Control on Microcontrollers with Conic-TinyMPC
Abstract
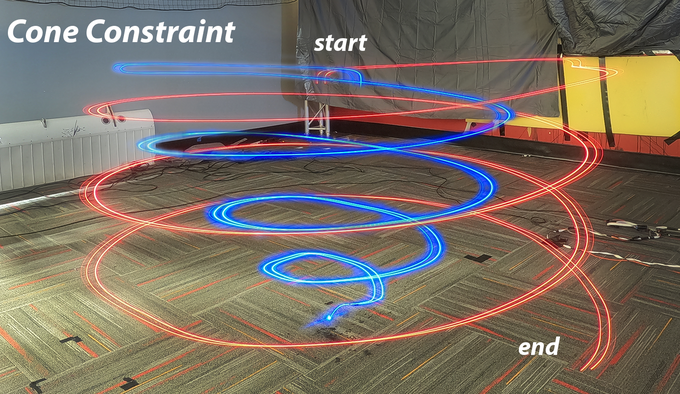
Model-predictive control (MPC) is a powerful framework for controlling dynamic systems under constraints, but it remains challenging to deploy on resource-constrained platforms, especially for problems involving conic constraints. To address this, we extend recent work developing fast, structure-exploiting, cached ADMM solvers for embedded applications, to provide support for second-order cones, as well as C++ code generation from Python, MATLAB, and Julia for easy deployment. Microcontroller benchmarks show that our solver provides up to a two-order-of-magnitude speedup, ranging from 10.6x to 142.7x, over state-of-the-art embedded solvers on QP and SOCP problems, and enables us to fit order-of-magnitude larger problems in memory. We validate our solver’s deployed performance through simulation and hardware experiments, including conically-constrained trajectory tracking on a 27g Crazyflie quadrotor. To get started with Conic-TinyMPC, visit our documentation, examples, and the open-source codebase at tinympc.org.