RoboShape: Using Topology Patterns to Scalably and Flexibly Deploy Accelerators Across Robots
Abstract
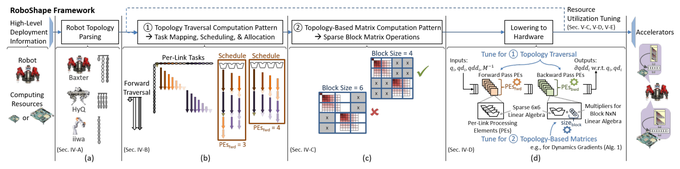
A key challenge for hardware acceleration of robotics applications is the enormous diversity of possible deployment scenarios. To create efficient accelerators while minimizing non-recurring engineering costs, it is essential to identify high-level computational patterns that are prescribed by the physical characteristics of the deployed robot system and directly embed these domain-specific insights into the accelerator design process. To address this challenge, we present RoboShape, an accelerator framework that leverages two topology-based computational patterns that scale with robot size: (1) topology traversals, and (2) large topology-based matrices. Using these patterns and building on prior work, we expose opportunities to directly use robot topology to inform architectural mechanisms including task scheduling and allocation, data placement, block matrix operations, and sparse I/O data. Designing architectures according to topology-based patterns enables flexible, scalable, optimized accelerator deployment across the nonlinear design space of robot shape and computing resources. With this insight, we establish a systematic framework to generate accelerators, and use it to implement three accelerators for three different robots, achieving speedups over state-of-the-art CPU and GPU solutions. For the topologically-diverse iiwa manipulator, HyQ quadruped, and Baxter torso robots, RoboShape accelerators on an FPGA provide a 4.0x to 4.4x speedup in compute latency over CPU and a 8.0x to 15.1x speedup over GPU for the dynamics gradients, a key bottleneck preventing online execution of nonlinear optimal motion control for legged robots.Taking a broader view, for topology-based applications, RoboShape enables analysis of performance and resource utilization tradeoffs that will be critical to managing resources across accelerators in future full robotics domain-specific SoCs.